具身与离身:智能的两种形态,终将走向何处?

当ChatGPT、通义千问、DeepSeek等大模型凭借海量的知识储备,在问答与创作领域展现出卓越能力时;当春晚舞台灯光亮起,宇树科技的人形机器人“福兮”身着艳色花袄,踏着欢快的鼓点,灵动地挥转着手绢时,我们已然窥见人工智能发展轨迹中呈现的两种鲜明样貌――一种是脱离物理躯体,在数据洪流中构建认知体系;另一种则是依托实体形态,在现实交互中生长实践能力。
在人工智能快速演进的今天,智能的形态呈现出多元分化的态势。其中,具身智能与离身智能代表了两种不同的研究方向与理念,理解这两种智能形态的区别,不仅有助于我们把握人工智能的发展脉络,更能为探索通用智能的实现路径提供重要启示。

存在形式:实体与虚拟
具身智能与离身智能最直观的区别体现在存在形式上。具身智能以物理实体为载体,这种实体并非简单的“容器”,而是智能本身的有机组成部分。从生物学视角看,人类和动物的智能始终与躯体紧密绑定――灵长类动物的对生拇指不仅是抓握工具,更塑造了其空间认知能力;鸟类的翅膀结构直接影响了它们对气流运动的理解。在人工智能领域,具身智能的典型代表是服务机器人、工业机械臂等实体系统,它们的传感器布局、运动机构直接决定了其感知世界的维度和与环境互动的可能性。
离身智能则呈现出无实体的特征,其存在形态表现为数据、算法和逻辑规则的集合。大模型,本质上是运行在服务器集群中的参数矩阵,既没有物理意义上的“身体”,也无需依赖实体器官完成认知活动。这种虚拟悬浮的存在形式,使得离身智能可以突破时空限制,在毫秒级时间内完成跨地域的数据处理。
需要指出的是,具身智能的实体载体具有不可分割性。如果将人形机器人的激光雷达拆除,其避障智能会直接失效;而离身智能的运行载体具有可替代性,同样的算法可以在不同服务器、不同终端间迁移,智能本身不会因硬件更换而改变。
认知路径:体验与数据
两种智能形态的核心差异,体现在认知路径的根本对立。具身智能遵循“体验-建构”的认知逻辑,其智能形成过程与身体的感官体验、运动实践深度耦合。发展心理学研究表明,人类婴儿对“客体永久性”,即物体消失后仍存在的认知的理解,并非来自先天逻辑,而是通过无数次抓握、抛掷物体的身体实践逐步建立的。这种认知模式在具身智能中同样显现,例如人形机器人通过反复摔倒、爬起的物理体验,逐步掌握复杂地形的行走策略,其运动智能蕴含在身体与环境的动态交互中,而非预设的数学模型。
离身智能则采用“数据-推演”的认知路径,其智能本质是对海量数据的统计归纳与逻辑演绎。AlphaGo的围棋智慧并非来自“下棋体验”,而是通过解析3000万局人类棋谱,建立起对棋局走势的概率预测模型;推荐算法通过分析用户点击、停留时长等数据,推断用户偏好,整个过程无需理解内容意”,仅依赖数据关联性完成决策。这种认知模式具有显著的间接性,离身智能无法直接感受世界,只能通过数据间接认知事物。
环境互动:动态与静态
在与环境的交互方式上,具身智能与离身智能呈现出“动态耦合”与“静态响应”的鲜明对比。具身智能处于与环境的实时动态交互中,其每一个决策都会引发环境变化,而环境变化又会即时反馈给智能系统,形成闭环互动。自动驾驶汽车在拥堵路段的变道决策,需要同时处理路面摩擦力、周边车辆加速度、行人突发横穿等动态变量,这种交互具有不可预测性,要求智能系统具备实时调整能力。
离身智能与环境的交互则具有“静态性”和“间接性”。搜索引擎在响应用户查询时,其处理的是已经存储的网页数据,与实时变化的物理环境无直接关联;即使是实时性较强的股票交易AI,其交互对象也仅是数据流,而非实体市场的交易行为本身。离身智能的交互过程更类似“输入-输出”的线性响应:接收标准化数据输入,经过算法处理后输出结果,整个过程与环境的动态关联较弱。
这种差异在抗干扰能力上表现尤为明显。具身智能由于直接嵌入物理环境,必须具备容错性,如家庭服务机器人在抓取水杯时,即使受到轻微碰撞,也能通过力传感器的反馈调整抓握力度;而离身智能对数据输入的“纯净度”要求极高,当输入数据存在噪声或缺失时,其决策准确性会急剧下降。
写在最后:
具身智能与离身智能的区别,并非意味着两者处于对立竞争关系。事实上,两种智能形态正在形成互补共生的生态系统。离身智能的优势在于处理抽象信息、进行逻辑推演,但其缺乏对物理世界的直观理解;具身智能擅长实时环境交互,却受限于实体载体的物理约束。
正如人类的思维与行动始终相互塑造,大脑的精密计算指导肢体动作,躯体的感官反馈又反哺认知升级。人工智能的两种形态,也将在虚拟决策与实体执行的闭环中彼此成就,共同铺就通向通用智能的路径。
- 华润系沈阳润欣商业挂牌价腰斩,年内六次降价待接盘 2025-07-17
- e络盟供应商 Weller Tools 庆祝成立 80 周年,隆重推出黑色特别版 WE1010 和 ZeroSmog Shield产品 2025-07-17
- 原中国金茂营销总李峰加盟京投发展,出任营销总 2025-07-17
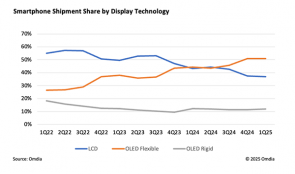
- 机构:Q1搭载AMOLED显示面板的智能手机出货占比提升至63% 2025-07-17
- 当一位“00 后”演员成为京东青春采销主播 2025-07-17
- 新濠影汇延续《玩具总动员》惊喜 今夏于新濠影汇水上乐园开启酷爽玩水季 2025-07-17
- 福日电子半年报预扭亏,46岁新财务总监赖荣上任 2025-07-16
- 具身与离身:智能的两种形态,终将走向何处? 2025-07-16